Теорема о сложении скоростей
 Из кинематики точки известно, что первая производная от радиуса-вектора движущейся точки по времени выражает скорость этой точки. Поэтому
Из кинематики точки известно, что первая производная от радиуса-вектора движущейся точки по времени выражает скорость этой точки. Поэтому  = r = υа — абсолютная скорость,
= r = υа — абсолютная скорость,  =υr — относительная скорость, а ω x r = υе — переносная скорость точки М. Следовательно, υа= υr+ υе Формула (11.79) выражает правило параллелограмма скоростей. Модуль абсолютной скорости найдем по теореме косинусов:
=υr — относительная скорость, а ω x r = υе — переносная скорость точки М. Следовательно, υа= υr+ υе Формула (11.79) выражает правило параллелограмма скоростей. Модуль абсолютной скорости найдем по теореме косинусов:υa=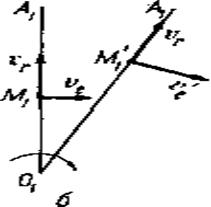
В некоторых задачах кинематики требуется определить относительную скорость υr. Из (11.79) следует υr= υа+( - υе ). Таким образом, чтобы построить вектор относительной скорости, нужно геометрически сложить абсолютную скорость с вектором, равным по абсолютной величине, но противоположно направленным переносной скорости.
Источник:
Лекции по теоретической механике. 2016
Еще по теме Теорема о сложении скоростей:
-
Автоматизация -
Метрология -
Механика -
Нефтегазовое дело -
Пищевая промышленность -
Приборостроение -
Строительство -
-
Антропология -
Астрономия -
Безопасность жизнедеятельности -
Библиотечное дело -
Биология -
Военное дело -
География -
Зоология -
История -
Культурология -
Литература -
Математика -
Медицина -
Педагогика -
Политология -
Право России -
Право України -
Психология -
Религоведение -
СМИ и журналистика -
Социология -
Технические науки -
Транспорт -
Физика -
Философия -
Финансы -
Экология -
Экономика -
Этнография и демография -
Юриспруденция -
Языкознание -