§ 7. Ускорения точек тела, вращающегося вокруг неподвижной оси
 ωτ=s, откуда, на основании формул (11.66) и (11.67),
ωτ=s, откуда, на основании формул (11.66) и (11.67), 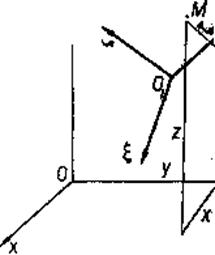 или ωn = R ω2 и ωτ = s== Rφ, или ωτ = Rε. Следовательно, нормальное ускорение точки тела при вращении его вокруг неподвижной оси равно произведению радиуса вращения на квадрат угловой скорости. Касательное ускорение равно произведению радиуса вращения на угловое ускорение. Нормальное ускорение направлено по радиусу вращения к центру вращения (рис. 51, а). Касательное ускорение направлено по касательной к траектории в сторону вращения, если движение ускоренное (ε > 0), и в сторону, противоположную вращению, если движение замедленное, т. е. ε< 0 (рис. 51, б, в).
или ωn = R ω2 и ωτ = s== Rφ, или ωτ = Rε. Следовательно, нормальное ускорение точки тела при вращении его вокруг неподвижной оси равно произведению радиуса вращения на квадрат угловой скорости. Касательное ускорение равно произведению радиуса вращения на угловое ускорение. Нормальное ускорение направлено по радиусу вращения к центру вращения (рис. 51, а). Касательное ускорение направлено по касательной к траектории в сторону вращения, если движение ускоренное (ε > 0), и в сторону, противоположную вращению, если движение замедленное, т. е. ε< 0 (рис. 51, б, в). 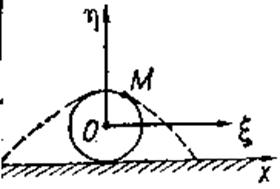
 Модуль полного ускорения точки найдем по формуле (11.44), т. е.
Модуль полного ускорения точки найдем по формуле (11.44), т. е.  или
или  Направление полного ускорения определим по тангенсу угла α, который полное ускорение образует с нормальным ускорением (рис. 52). Получим tgα=
Направление полного ускорения определим по тангенсу угла α, который полное ускорение образует с нормальным ускорением (рис. 52). Получим tgα= или tgα=
или tgα= Пример. Маховик вращается согласно уравнению φ = 2t2. Определить скорость, касательное, нормальное и полное ускорения точки на ободе маховика в момент t = 10с, если R = 1,2 м. Величину линейной скорости определим по формуле υ =Rω. Имеем ω= φ = 4t рад/с, ε = φ = 4 рад/с2, следовательно, υ = 1,2 • 4t = 4,8t м/с. В момент t = 10с υ= 48 м/с. Касательное ускорение ωт = Rε = 1,2 • 4 = 4,8 м/с2 = const нормальное ускорение ωn = Rω2 = 1,2 • 16t2 = 19.2t2. При t =10 с ωn = 1920 м/с2. Полное ускорение ω=
Пример. Маховик вращается согласно уравнению φ = 2t2. Определить скорость, касательное, нормальное и полное ускорения точки на ободе маховика в момент t = 10с, если R = 1,2 м. Величину линейной скорости определим по формуле υ =Rω. Имеем ω= φ = 4t рад/с, ε = φ = 4 рад/с2, следовательно, υ = 1,2 • 4t = 4,8t м/с. В момент t = 10с υ= 48 м/с. Касательное ускорение ωт = Rε = 1,2 • 4 = 4,8 м/с2 = const нормальное ускорение ωn = Rω2 = 1,2 • 16t2 = 19.2t2. При t =10 с ωn = 1920 м/с2. Полное ускорение ω= =1920.6 м/с2
=1920.6 м/с2 СЛОЖНЫЕ ДВИЖЕНИЯ ТОЧКИ
§ 1. Абсолютное, относительное и переносное движения точки  В ряде случаев приходится рассматривать движение точки по отношению к системе координат О1ξηζ, которая, в свою очередь, движется по отношению к другой системе координат Охуz условно принятой в качестве неподвижной. В механике каждую из указанных систем координат связывают с некоторым телом. Например, рассмотрим качение без скольжения колеса вагона по рельсу. С рельсом свяжем неподвижную систему координат Аху, а подвижную систему Oξη свяжем с центром колеса и предположим, что она движется поступательно. Движение точки на ободе колеса является составным или сложным. Введем следующие определения: 1. Движение точки относительно системы координат Охуz (рис. 53) называется абсолютным. 2. Движение точки относительно подвижной системы координат O1ξηζ называется населенным. 3. Переносным движением точки называют движение той точки тела, связанного с подвижной системой координат О1 ξηζ, относительно неподвижной системы координат, с которой в данный момент совпадает рассматриваемая движущаяся точка. Таким образом, переносное движение вызвано движением подвижной системы координат по отношению к неподвижной. В приведенном примере с колесом переносное движение точки обода колеса обусловлено поступательным движением системы координат О1 ξηζ по отношению к неподвижной системе координат Аху.
В ряде случаев приходится рассматривать движение точки по отношению к системе координат О1ξηζ, которая, в свою очередь, движется по отношению к другой системе координат Охуz условно принятой в качестве неподвижной. В механике каждую из указанных систем координат связывают с некоторым телом. Например, рассмотрим качение без скольжения колеса вагона по рельсу. С рельсом свяжем неподвижную систему координат Аху, а подвижную систему Oξη свяжем с центром колеса и предположим, что она движется поступательно. Движение точки на ободе колеса является составным или сложным. Введем следующие определения: 1. Движение точки относительно системы координат Охуz (рис. 53) называется абсолютным. 2. Движение точки относительно подвижной системы координат O1ξηζ называется населенным. 3. Переносным движением точки называют движение той точки тела, связанного с подвижной системой координат О1 ξηζ, относительно неподвижной системы координат, с которой в данный момент совпадает рассматриваемая движущаяся точка. Таким образом, переносное движение вызвано движением подвижной системы координат по отношению к неподвижной. В приведенном примере с колесом переносное движение точки обода колеса обусловлено поступательным движением системы координат О1 ξηζ по отношению к неподвижной системе координат Аху.
 Различают также абсолютную, переносную и относительную скорость и соответственно абсолютное, переносное и относительное ускорения точки. Абсолютную скорость обозначают υa, относительную — υr, переносную — υе Соответственно ускорения обозначают: ωа, ωr и ωе. Основной задачей кинематики сложного движения точки является установление зависимости между скоростями и ускорениями точки в двух системах координат: неподвижной и подвижной. Для доказательства теорем о сложении скоростей и ускорений в сложном движении точки введем понятие о локальной или относительной производной.
Различают также абсолютную, переносную и относительную скорость и соответственно абсолютное, переносное и относительное ускорения точки. Абсолютную скорость обозначают υa, относительную — υr, переносную — υе Соответственно ускорения обозначают: ωа, ωr и ωе. Основной задачей кинематики сложного движения точки является установление зависимости между скоростями и ускорениями точки в двух системах координат: неподвижной и подвижной. Для доказательства теорем о сложении скоростей и ускорений в сложном движении точки введем понятие о локальной или относительной производной.