Переходная функция
X(t) = 1(t) ; Y(t) = L{1(t)} = H(t).
Так как свойства системы не зависят от того, что подавать ее вход, то эти характеристики можно однозначно связать между собой:
t
H(t) = j h(u)du + T(t) (зависит от начальных условий): 0
h(t) = dH (t) + 9(t) (производная от T (t)).
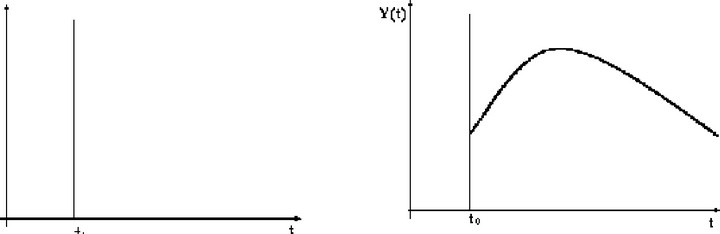
dtПодадим на вход системы сигнал X(t) = S(t -то) (в соответствии с рисунком 1):

Рисунок 1 - График ИПХ динамической системы
Из графика видно, что система не является генератором, и ее выходной сигнал рано или поздно устремится к нулю.
Импульсная переходная характеристика ЛДС будет зависеть как от текущего времени, так и от момента подачи на вход системы 8 -функции.
Удобно записать форму этой зависимости несколько иначе: h(t, т о) = h(t- т о, т о) = h(t- т о ,t).
Для стационарных систем справедливо:
h(t, т о) = h(t- т о),
то есть ИПХ системы не зависит от начального состояния, а лишь от
7
момента подачи на ее вход импульса (т о) и момента рассмотрения t:
h(t, т о) = h(t- т о) = h( т). (1.2)
Для нестационарных динамических систем ИПХ является функцией двух аргументов.
В дальнейшем станем рассматривать и описывать только стационарные ДС, для описания которых существует общая методика решения. На рисунке 2 изображены различные виды импульсных характеристик.
У генераторных систем (рисунок 2в) ИПХ носит незатухающий характер, такие системы неустойчивы в отличие от систем с затухающими импульсными характеристиками (рисунок 2а и 26).
2а 26 2в
Рисунок 2 - Различные виды импульсных переходных
характеристик
ИПХ устойчивой системы должна представлять абсолютно интегрируемую функцию, то есть она должна обладать следующими свойствами:
Т < ж.
1) J |h( x)|d
2) lim h(Т) = 0.
Т —^ ж
Зная ИПХ, можно составить суждение о быстродействии системы. Действительно, ИПХ существенно отличается от нуля не во всем диапазоне своего аргумента, а лишь в некоторой его части. Тот интервал, после которого ИПХ можно считать практически равной нулю, называется длительностью импульсной переходной характеристики и обозначается Т U.