4.3. Информационное обеспечение сборочного производства. Уровни управления
Спецификой сборочного процесса является манипуляция на уровне управления технологическим оборудованием объектами сборки с томощью сборочных машин или роботизированных технологических сомплексов.
Управляющие программы составляют на основании :схемы сборки и технологических карт, описывающих процесс сборки. После перехода на язык управляющих программ информационное обеспечение сборочного производства может быть рассмотрено с общих позиций построения ИАСУ производственной системы (ПС).Под ПС понимают целостную структурную единицу, предназна- 4енную для выпуска продукции определенного вида в пределах своих технологических возможностей при условии обеспечения необходимыми ресурсами.
Для ПС могут быть выделены следующие основные виды связей, формирующих внешний интерфейс:
технологический интерфейс, определяющий возможности обработки, а также свойства и параметры преобразуемых объектов (заготовок) и всех ресурсов, необходимых для работы (инструмента, оснастки и т.д.);
механический интерфейс, определяющий конкретный способ подачи материальных объектов в ПС и выдачи их обратно; организационный интерфейс;
информационный интерфейс, определяющий содержание, форму построения и процедуры обмена информацией с внешней средой (персоналом и системой управления верхнего уровня);
коммуникационный (сетевой) интерфейс, определяющий средства и возможности обмена информацией с внешней средой;
пользовательский интерфейс, определяющий средства и возможности персонала по управлению производственной системой;
интерфейс инфраструктуры, определяющий подключение к системе жизнеобеспечения (энергоснабжение, канализация, подача воздуха, СОЖ и т.д.).
При детальном анализе возможна дополнительная структуризация каждого из указанных видов интерфейсов. Для каждого из интерфейсов могут быть определены и свойственные ему виды точек доступа.
| Срочные заОанип Планы верхнего уровня
Рис. 4.13. Уровни системы управления производственной системы |
Уровни системы управления. Производственная система имеет несколько уровней управления (рис. 4.13): планирование; диспетчи- рование; оперативное управление; управление оборудованием.
Данная иерархия характерна для ПС любого ранга. В частности, система оперативного управления (СОУ) на уровне завода выполняет межцеховые перевозки, обслуживание общезаводских складов и координацию работы цехов. На уровне участка СОУ выполняет транспортирование между рабочими модулями участка, связь с внешней средой, обслуживание склада участка и координацию работы модулей при выполнении планов участка. Таким обра-
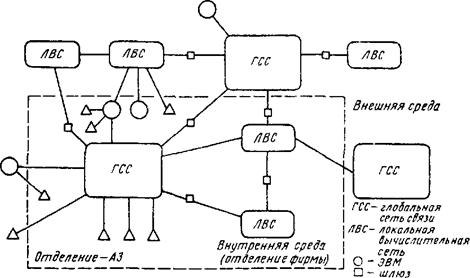 Рис. 4.14. Информационные потоки в системе управления |
зом, благодаря рекурсивному характеру структуры ПС функции СОУ (а также и других уровней иерархии управления) интерпретируются таким же образом независимо от ранга ПС. При этом в силу рекур- сивности уровень оперативного управления завода взаимодействует с уровнем планирования цехов и т.д. Этим достигается целостность всей системы управления. Информационные потоки в СОУ показаны на рис. 4.14.
Планирование производства. 1. Система планирования обеспечивает разработку стратегии для системы управления процессом производства изделий с учетом состояния внутренней и внешней среды в соответствии с заданными критериями функционирования ПС и заказами.
2. Планирование осуществляется методом "just in time" (точно вовремя).
3. При планировании используется многовариантная технология изготовления изделий, разработанная системой САПР и САПР ТП, с которыми она имеет обратную связь.
4. Система планирования ориентирована на непрерывное изменение состояния внешней среды при динамической адаптации структуры, состава, надежности и технологических возможностей внутренней среды ПС.
5. Система производит вариантное планирование производства по различным критериям или их возможной комбинации.
6. Система планирования производства имеет распределенную иерархическую структуру, у которой возможна динамическая реконфигурация, и содержит ряд подсистем различного функционального назначения и горизонта планирования.
7. Система имеет следующую иерархическую структуру: подсистема "Перспективное планирование"; подсистема "Текущее планирование"; подсистема "Оперативное планирование".
8. Планирование осуществляется методом "сверху вниз" с обратной связью по состоянию внешней и внутренней среды методом "снизу вверх".
9. Система планирования должна быть реализована в виде многоуровневой экспертной системы или представлять ряд вложенных частных экспертных подсистем со своими базами знаний и множеством правил на каждом уровне иерархии.
10. Система должна предоставлять пользователю-непрофессионалу в области вычислительной техники естественный языковой интерфейс так, что возможно вмешательство в процесс планирования любого уровня и объяснение последовательности принятия того или иного решения по требованию пользователя при ее работе в автоматическом режиме.
11. Архитектура системы планирования должна быть открытой и позволять параметрическую, структурную и критериальную настройку без перерегенерации системы и допускать поэтапный ввод системы в эксплуатацию.
12. Практическая реализация системы планирования должна быть выполнена с использованием распределенной БД и вычислительной сети, единых для всех систем ПС в целом.
13. Для обмена информации внутри ПС необходимо придерживаться по возможности протокола MAP.
Подсистема перспективного планирования. 1. Перспективное планирование выполняется для определения стратегии производства, которая может включать в себя рекомендации по выпуску нового изделия, прекращению производства некоторых изделий, изменение объемов, номенклатуры деталей для производства.
Перспективное планирование формулирует цели и порядок выполнения плановых заданий нижнего уровня.2. Цель перспективного планирования — оценка предполагаемого эффекта, который может быть оценен на основании результатов моделирования реализации стратегии на производстве. Вследствие этого система должна включать в себя систему моделирования.
Подсистема текущего планирования. 1. Текущее (среднесрочное) планирование предназначено для составления производственных программ, удовлетворяющих требованиям выработанной стратегии. Производственные программы формируются на основе информации о состоянии производственных ресурсов, оборудования материалов.
2. Для составления производственной программы необходимо оценить соответствие имеющихся производственных мощностей и ресурсов требуемыми. Если требуемые ресурсы не соответствуют имеющимся, необходимо сбалансировать мощности до приемлемого уровня.
Подсистема оперативного планирования. 1. Оперативное планирование — это набор действий, связанных с существующей иерархией и поэтапным планированием производственного процесса, который основывается на оперативной информации о текущем состоянии процесса производства.
Заказы, в большинстве случаев, рассчитываются по программе "Текущий план", но должны быть предусмотрены действия в исключительных ситуациях.
2. Частота планирования будет зависеть от типа и характера возможных исключительных ситуаций.
Диспетчирование. Основные функции подсистемы следующие: входной (выходной) контроль комплектующих и материалов для технологического процесса; техническое обслуживание и ремонт оборудования; диагностирование; управление ресурсами; управление персоналом; испытания.
Перечисленные выше функции рассматриваются как функции, обеспечивающие выполнение общей цели— инициализации, а также контроль подготовки и выполнения плановых заданий изготовления, материального обеспечения и технического обслуживания.
Конечная цель системы диагностирования — обеспечение ритмичного функционирования производства в соответствии с плановыми заданиями.
Поэтому система диагностирования (регистрация событий и обеспечение информацией о появлении сбоев станка или системы) должна выполнять ряд функций управления ресурсами и персоналом.Информация, получаемая в системе диагностирования, должна использоваться в системе оперативного управления, планирования и организации производства на различных уровнях для принятия
правильного решения о следующем: использовании склада (модуля, участка, цеха, завода); размещении имеющейся рабочей силы; размещении и составе ремонтных бригад; замене оборудования; перегруппировке производственных процессов для выполнения плановых заданий и т.д.; определении межоперационных заделов и ресурсов и др. Оперативное управление. Система оперативного управления (СОУ) принимает с соседнего верхнего уровня команды на выполнение заданий (планов) и координирует работу оборудования, а в общем случае — работу ПС более низкого ранга. Параметры плановых заданий, так же как и необходимая технологическая информация, выбираются из общей базы данных. В процессе выполнения плановых заданий СОУ передает на верхний уровень и заносит в общую базу данных учетную информацию.
Задания (планы) верхнего уровня могут быть разбиты на следующие основные классы: материально-техническое обеспечение; изготовление; техническое обслуживание; оснащение.
По существу, СОУ обеспечивает управление материальными потоками, т.е. инициализацию, координацию и контроль выполнения манипуляций с ресурсами в соответствии с заданиями, поступающими с верхнего уровня. Таким образом, в состав СОУ входят следующие уровни (рис. 4.15):
супервизорный, который интерпретирует задания верхнего уровня, превращая их в последовательность команд службам СОУ;
сервисный (уровень служб), который содержит глобальные службы транспортировки, складирования, обработки и др.;
манипуляционный, который содержит ПС нижнего ранга и, в частности, модули различных типов (транспортные, складские и рабочие);
виртуального оборудования, который принимает запросы на выполнение манипуляций оборудованием внутри модулей.
| Система диспетчирования
Система упрощения виртуальным оборудованием |
Службы СОУ. Важной составляющей рассматриваемой архитектуры является служба, под которой подразумевается объединение функционально эквивалентных компонентов ПС (принадлежащих, быть может, различным уровням иерархии ПС), являющееся для
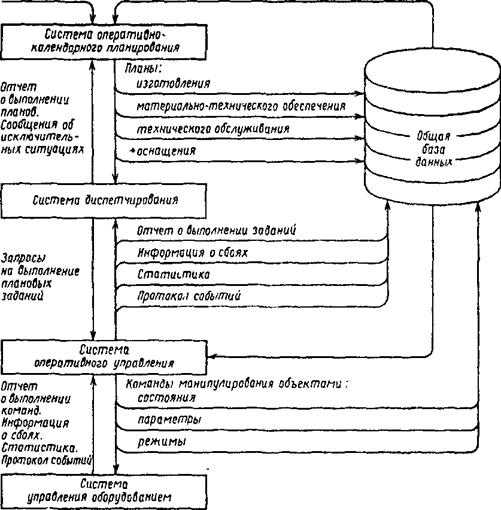 Рис. 4.16. Структура доступа службы СОУ в сетевой среде |
остальных компонентов ПС единым объектом, предоставляющим определенные услуги. Примером может служить транспортная служба, которая имеет единообразный интерфейс (протокол доступа) для всех компонентов ПС (персонала и других служб).
Уровни и компоненты службы. Служба состоит из функциональных компонентов — контроллеров службы (КС), образующих иерархию случайных уровней (рис. 4.16):
супервизорного, состоящего из супервизорных контроллеров службы (КСС);
манипуляционного, состоящего из контроллеров модулей (КСМ); виртуального оборудования, состоящего из контроллеров виртуального оборудования (КСВО);
исполнительного, состоящего из контроллеров исполнительных устройств (КСУ).
Пользователи службы, представленные соответствующими контроллерами (КСП), располагаются на верхнем уровне иерархии.
Пользователь получает доступ к службе, логически подключаясь к одному из супервизорных контроллеров. В дальнейшем вопросы пользователя передаются именно этому контроллеру, который фактически представляет службу. Отношение подключения устанавливается динамически.
Каждый КСС координирует работу одною или нескольких модулей службы. Контроллер модуля, в свою очередь, координирует работу компонентов оборудования модуля, представленных своими функциональными моделями — контроллерами виртуального оборудования. КСВО управляет одним или несколькими контроллерами исполнительных устройств, реализующих физическое выполнение манипуляций.
Система протоколов службы. В соответствии с иерархией уровней службы СОУ предусмотрена система протоколов службы: вертикальных и горизонтальных, определяющих взаимодействие соответственно контроллеров соседних уровней и в пределах одного уровня.
Управление оборудованием. Уровень управления оборудованием непосредственно отвечает за выполнение манипуляций с материальными объектами, участвующими в технологическом процессе. Здесь одной из важнейших проблем является обеспечение независимости управления более высоких уровней от особенностей конструктивного исполнения и средств управления исполнительными механизмами технологического оборудования. Действительно, например, операции загрузки (разгрузки) деталей на технологическом оборудовании могут выполняться различными манипуляторами. В то же время все они в данной ситуации являются функционально эквивалентными устройствами, способными выполнять одинаковую функцию. Поэтому для системы управления ПМ, по существу, важно лишь то, что они в состоянии отработать команды "загрузить (разгрузить) деталь".
Аналогично анализ может быть проведен и для других функций, выполняемых различными видами оборудования. Существует понятие виртуального оборудования, т.е. структурно-функциональной модели, описывающей внешнее поведение реального оборудования определенного типа с точки зрения его взаимодействия с внешней средой по некоторому протоколу. Таким образом, может быть определен виртуальный робот, виртуальный оклад, виртуальное транспортное устройство и т.д. Фактически для системы управления верхнего уровня компонент виртуального оборудования представляется как некоторый функциональный блок, воспринимающий команды на выполнение определнных функций и сообщающий о результатах их выполнения. И с этой точки зрения внутреннее устройство данного компонента не имеет значения, оно скрыто от системы управления благодаря ведению протокола взаимодействия с ним.