5.14. Выбор вида, компоновки и числа автоматизированных станочных систем .
В состав РТК (см. рис. 5.36) в первую очередь следует включать станки с ЧПУ и цикловым программным управлением и станки- полуавтоматы.
Компоновочные варианты РТК определяются решаемыми технологическими задачами, уровнем автоматизации, числом и типажом ПР, их техническими и функциональными характеристиками: индивидуальное (рис.
5.60, а—в) или групповое (рис. 5.60, а-в) обслуживание оборудования. Проектная производительность РТК
Рис. S.60. Основные варианты компоновочных схем РТК:
I — индивидуальное обслуживание оборудования: а — ПР встроен в оборудование; б — ПР размещен рядом с оборудованием; в — несколько ПР размещены рядом с оборудованием; II — групповое обслуживание оборудования; г -- линейное расположение оборудования; д — круговое расположение оборудования; 1 — ПР; 2 — основное технологическое оборудование; 3 — магазин с заготовками, деталями или инструментом; 4 — конвейер; 5 — вспомогательное устройство ПР
Здесь пц — число деталей, обрабатываемых за цикл; Tц — время цикла; i = 1,2, ..., m — количество основного оборудования в РТК; tт р — время текущих ремонтов; — время смены и наладки инструмента; tи — время технического и организационного обслуживания оборудования; tp — время работы без перерывов в течение Тц; tc = = t0.0 + tпр + tB 0 — время простоев, связанных со сменой и подналад- кой инструмента, отказами устройств РТК; t00 — потери времени из - за простоев основного оборудования; inp — потери времени из-за простоев ПР; tB 0 — потери времени из-за простоев вспомогательного оборудования.
Коэффициент технического использования РТК kT = tp/(tp + tc) = 1/(1 + кс), где кс = tc/tp —
где kт.о, kт.пр , kт.в - коэффициенты соответственно технического использования основного оборудования ПР, вспомогательного оборудования.
Проектная производительность
Расчет количества основноготехнологическогооборудования РТК выполняют исходя из суммарной станкоемкости (станко-ч) изготовления годовой программы выпуска деталей. Количество оборудования К – й модели:
- суммарное штучно-калькуляционное время определенного вида операции для j-и подгруппы деталей по i-му изделию (с учетом применяемости деталей на изделие); Ni — годовой объем выпуска г-го изделия; Фэ — эффективный годовой фонд производственного времени оборудования, г; i=1,2, ..., п — число наименований выпускаемых изделий,
 ,
,
где t ш.кq — штучно-калькуляционное время q-й операции механической обработки для j-й подгруппы деталей i-го изделия, выполняемой на универсальном оборудовании и подлежащей переводу на к-ю модель станка с ПУ (полуавтомат) , на базе которого создается РТК t ш.кz — штучно-калькуляционное время z-й операции для j-й подгруппы деталей i-го изделия, выполняемой на станке с ПУ k-й модели; k1 — коэффициент снижения станкоемкости, обусловленного переводом операций с универсального оборудования на оборудование с ЧПУ (k1 = 0,5...95 в зависимости от типа деталей и операций); k2 — коэффициент снижения станкоемкости вследствие обслуживания станков ПР; kПУ, kЧПУ — коэффициенты, учитывающие процент выполнения действующих норм выработки на предприятии соответственно для оборудования универсального и с ЧПУ. Указанные коэффициенты могут быть выбраны из справочника.
Многостаночные РТК организуют при минимальном штучном времени обработки заготовок, в РТК tш > 3 мин. Для каждой модели обслуживаемых станков число ПР mПР = тс/км 0, где тс — принятое число станков, подлежащих переводу на обслуживание ПР; кмо — коэффициент многостаночного обслуживания (число станков, обслуживаемых одним ПР).

Минимальное число станков, обслуживаемых одним ПР, рекомендуется принимать не более четырех.
PTJI с гибкой межпозиционной связью имеют на входе и выходе склады накопители, a PTJI с жесткой межпозиционной связью их не имеют и все входящие в линию РТК должны функционировать синхронно в одном режиме, так как отказ любого элемента ведет к останову РТЛ. Коэффициент технологического использования РТЛ:
где m – число РТК в РЛТ
kРЛТ — коэффициент внецикловых потерь РТЛ, представляет собой сумму потерь времени всех его элементов.
Повышения ктРТЛ можно достичь за счет создания промежуточных межсекционных накопителей. Степень компенсации потерь может быть учтена коэффициентом межсекционного положения потерь км, показывающим, какая часть простоев одного РТК переходит в простои другого РТК.
В зависимости от вместимости накопителей


где km - цикл работы РТЛ; tcp - среднее время единичного простоя (определяют на основе статистических данных); qmax - максимальная вместимость накопителей.
Тогда с учетом ч астичной компенсации простоев


где j = 0,7...0,8 — доля не совпадающих по времени компенсирующих простоев РТЛ.
При равном числе РТК, входящих в РТЛ, производительность РТЛ:
 с жесткой межоперационной связью
с жесткой межоперационной связью
 с гибкой межоперационной связью
с гибкой межоперационной связью
где kTi — собственные внецикловые потери i-ro РТК.
Qж.с соответствует минимальной, a Qr с — максимальной производительности РТЛ.
Комплексный показатель надежности кн = t0/t0TK + tB0C, где Z0TK — время наработки ПР на отказ; tBQC — среднее время восстановления работоспособности ПР.
При эксплуатации РТК необходимо обеспечить ритмичность производственного процесса и синхронность операций. Для РТК устанавливают усредненный ритм гср и путем подбора и группирования операций обеспечивают равенство или кратность между гср и продолжительностью операций: rcp = tmi/mc. Синхронизация обеспечивает минимум простоя основного оборудования РТК, увеличение его производительности.
В ГПС для многономенклатурного мелкосерийного производства ГПМ оснащают широким набором дополнительных устройств, увеличивающих их гибкость. ГПМ, работающие в режиме безлюдной технологии, должны отвечать ряду специальных требований, которые можно разделить на основные и дополнительные. Например, токарным ГПС предъявляют следующие основные требования: управление от ЭВМ, наличие магазина инструментов, конвейера для сбора стружки, автоматический зажим и разжим заготовок в патроне станка. К дополнительным требованиям относятся возможность автоматической переналадки патрона по программе, регулировки по программе силы зажима заготовки определяемого жесткостью заготовки и силами резания, автоматической корректировки УП при изнашивании режущего инструмента и т.д. Аналогичным требованиям должны отвечать и ГПМ на базе многоцелевых сверлильно-фрезерно-расточных станков. Кроме этого, такие ГПМ должны отвечать специфическим требованиям: наличие магазинов приспособлений-спутников, многошпиндельных головок, возможность замены комплектов инструментов или целиком инструментальных магазинов; замена тары для стружки и емкостей для СОЖ при переходе на обработку различных материалов; очистка от стружки опорных поверхностей спутников и позиционных приспособлений; корректировка положения заготовки в спутнике и т.д. Обязательным требованием к ГПМ является возможность его встраивания в ГПС. Поэтому он должен иметь стандартные сопрягающие устройства для стыковки с АТСС, с центральной ЭВМ, а также отдельными системами ЧПУ станков, ПР и транспортных устройств. ГПМ создают на основе модульного принципа.
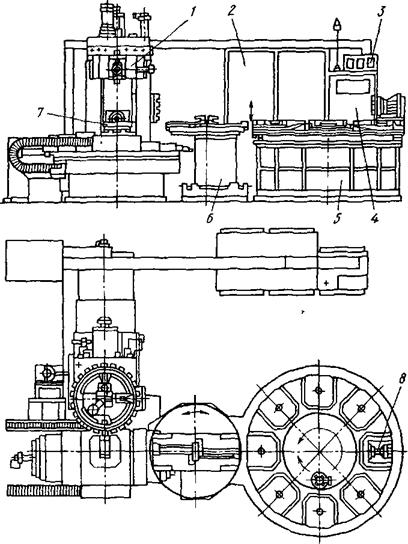
На рис. 5.61 представлена компоновка ГПМ "Модуль 500" созданного на базе многоцелевого станка ИР-500МФ4, оснащенного дополнительным накопителем 5 приспособлений-спутников. Устройство 6 смены спутников представляет собой двухпозиционный поворотный стол, связывающий станок с накопителем. На спутник можно уста-
 Рис, 5.61. Компоновка ГПМ "Модуль-500" на базе многоцелевого станка ИР-500 МФ4: I — станок, 2 — шкаф электрооборудования, 3 — система управления измерением параметров обработки; 4 — устройство ЧПУ; 5 — накопитель спутников; 6 — устройство смены спутников; 7 — спутник, 8 — кассета с инструментом |
навливать как заготовку, так и кассету с инструментом. Кассета в нужный момент подается на стол станка, а затем манипулятор заменяет инструмент.
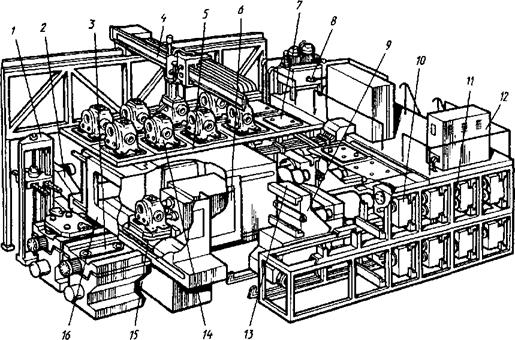
На рис. 5.62 показан гибкий сверлильно-фрезерно-расточной модуль МА2765МЗФ4 с ЧПУ, служащий для многооперационной обработки заготовок корпусных деталей из черновых и цветных металлов. ГПМ может работать как индивидуально, так и в составе
 Рис. 5.62. Переналаживаемый ГПМ с магазином многошпиндельных коробок |
ГПС. Он состоит из многоцелевого станка 6, систем автоматической смены многошпиндельных коробок, несущих режущий инструмент, и обрабатываемых заготовок, системы управления 12. Станок состоит из привода главного движения 13, поперечного подвижного поворотного стола 15, ограждения 16 устройства для удаления стружки 2, гидрооборудования 8. Система автоматической смены заготовок включает двухпозиционную станцию загрузки и зажима 3 заготовок, подъемник-укладчик 1, подающий посредством манипулятора 4 заготовки 14 со склада 5 на станцию загрузки.
На складе кроме заготовок хранятся столы-спутники 7 с приспособлениями для установки и закрепления заготовок. При переналаживании модуля заменяют зажимные приспособления, СШК 10 с инструментами 11, УП обработки партии заготовок новых деталей. УП вводятся в ЧПУ либо с пульта управления ГПМ, либо путем замены программоносителя. Доставка СШК на модуль осуществляется транспортным устройством 9.На типовых компоновочных схемах указывают как жестко заданный маршрут перемещения обрабатываемых заготовок (в ГАЛ), так и гибкие маршруты (в ГАУ). Маршрут перемещения заготовок в ГПС выбирают после выполнения операций в зависимости от того, возвращается ли она на склад в процессе обработки или нет. Это обусловли
вает косвенную (через склад) или прямую связь оборудования между собой. В первом случае заготовки транспортируются непосредственно со склада к оборудованию. После обработки на одном станке заготовка перемещается к другому, минуя склад.
Этот принцип обработки используют в условиях крупносерийного производства при длительном цикле обработки, значительной массе заготовки. Косвенная связь означает, что транспортирование заготовки осуществляется от одного станка через склад к другому. Он используется при малой длительности цикла обработки. При косвенной связи оборудования обеспечивается более полная его загрузка, заготовки новой партии деталей транспортируются к станку только по окончании обработки предыдущей партии, что не требует увеличения вместимости накопителей ГПС, весь производственный процесс упрощается и контролируется с центрального пункта управления и поэтому подается только нужное число заготовок.
В зависимости от схемы расположения оборудования в ГПС транспортирование заготовок и других компонентов материального потока организуется по жесткому (рис. 5.63, а, б, г) или по гибкому маршруту. При комбинированном потоке на отдельных участках ГПС маршрут может не изменяться, а на других может быть изменен. В этом случае транспортную систему планируют так, чтобы заготовки могли подаваться к оборудованию в различной последовательности, пропус-
 |
Рис. 5.63. Типовые компоновочные схемы расположения оборудования в ГПС: а — параллельная; б — линейная однорядная; в — линейная многорядная; г, д — круговая; е — роторная; а, б, в — разомкнутое положение оборудования; г, д, е — замкнутое положение оборудования
5.7. Варианты перемещения материального потока в зависимости от расположения оборудования
| ||||||||||||||||||||||||||||||||||
| Примечание. Знак "+" означает наличие, знак "—" — отсутствие. |
кая какую-либо единицу оборудования ГПС (табл. 5.7). На основе использования различных компоновочных решений разработаны типовые схемы размещения оборудования в ГПС различного технологического назначения для мелко-, средне- и крупносерийного производства.
На рис. 5.64 показана схема типового ГАУ "Талка-500", предназначенного для изготовления корпусных деталей (L*BxH до 500*500x500 мм) в условиях мелкосерийного производства. Он включает четыре ГПМ 5 (см. рис. 5.62), автоматизированную транспо-
| 1 2 3 4
Рис. 5.64. Схема типового ГАУ "Талка-500" |
Рис. 5.65. Структурно-компоновочная схема ГПС АСВ-31 для изготовления деталей типа тел вращения: 1 - станок П756ДФЗ, 2 - ПР СМ80Ц2502, 3 - АТСС, 4 - подвижные тактовые столы для кассет с заготовками, 5 — кран-штабелер СЧ22504, 6 — станция обслуживания, 7 — устройства входа-выхода АТСС |
ртную систему 6, склад 3, отделения для подготовки спутников 2 и инструментальных комплектов 4, автоматизированный комплекс / на базе малой ЭВМ для подготовки УП, УВК 7 на базе типового комплекса ЭВМ СМ2 с необходимыми переферийными устройствами, служащий для организации и управления технологическими процессами обработки, выдачи информации о текущем состоянии процессов и оборудования ГАУ.
Компоновка типового ГАУ для изготовления деталей типа тел вращения показана на рис. 5.65. ГАУ для обработки валов и фланцев (50—60 тыс. шт/год при двухсменной работе) эксплуатируют в среднесерийном производстве. В состав ГАУ входят токарные полуавтоматы с ЧПУ и многоцелевые станки сверлильно-фрезерно-расточной группы. ГАУ построен по технологическому принципу из станков одинакового технологического назначения и модели. ГАУ, состоящий из семи секций, управляется УВК.
Годовая программа выпуска деталей в ГПС (станко-ч)
где n — число наименований выпускаемых, шт.; Тср — выработанная средняя станкоемкость технологической операции, включающая среднее цикловое время обработки и время загрузки-выгрузки заготовки, станко-ч; Тп 3 ср — удельное среднее подготовительно-заключительное время, станко-ч; Nt — годовая программа выпуска ьго изделия, шт.; i = 1, 2, ...; К] — число у'-х деталей, входящих в состав комплекта по г-му изделию (с учетом применяемости на изделие); /ср — среднее число операций полной размерной обработки /'-х деталей.
Производительность ГПМ определяется числом технологических операций, выполняемых за единицу времени.
Цикловая производительность обработкой, смены; t^cp — то же, перед последующей обработкой, смены; кг — коэффициент, учитывающий неравномерность грузооборота (кг = 1,25); кс — число рабочих смен в сутки; Фн — номинальный фонд времени в году, дни.
Количество транспортных средств ГПС определяют исходя из того, что условия работы АТСС соответствуют условиям работы систем массового обслуживания (СМО) с пуансоновским законом распределения времени заявок на обслуживание оборудования. Заявка возникает по окончании обработки на станке заготовки или заготовок, размещенных в транспортной таре или позиционном накопителе.
Интенсивность потока заявок на транспортное оборудование А. = = {Тп/[2Тср(тс — тп)]} + 2тп, где Тп — расчетный период времени, ч; rcp — выборочная средняя станкоемкость технологической операции, ч ( в случае группового транспортирования деталей Тср = = Y.Tcpk{j); mn — число станков, подлежащих переналадке за период Тп.
Первое слагаемое в формуле учитывает время подачи заготовок (тары с заготовками при групповом способе транспортирования); второе — подачи к станкам оснастки, когда при переналадке оборудования она выполняется АТСС.
Длительность обслуживания заявки определяется типом транспортного средства, его скоростными характеристиками и длиной трассы. Для транспорта циклического действия (транспортные манипуляторы, краны штабелеры) длительность обслуживания (мин) при двухадресном режиме Гд = 2(tp + tT + tn + tB n), где tp, tT — время соответственно разгона и торможения транспортного средства, мин; tR — время его движения на маршевой скорости, мин; /в п — время выполнения цикла взять — поставить, мин.
Для определения Т обычно используют среднюю длину пути движения транспортного средства на маршевой скорости, составляющую 0,3—0,5 длины трассы.
Интенсивность обслуживания ц = 1/Гд. Основное условие функционирования АТСС следующее: а < ттс, ще а = Я/ц — коэффициент; mT с — число транспортных средств. Длина очереди (шт.) Lj =
mc
= Е (z — mTC)Pk, где z — число заявок на обслуживание, шт.;
k=mr.c
Рк — вероятность того, что в системе на обслуживание и в очереди находится ^-требований; Рк = (mc! а4Р0)/[K\(mc — А)] при 1
Глава I Автоматический производственный процесс в машиностроении (ЕР Ковальчук) 5
1 1 Основные определения и задачи автоматизации
производства 5
1 2 Основные характеристики производственного
процесса 9
3 Размерные, временные и информационные
связи в интегрированном производстве 12
Глава. 2 Основы проектирования и реализации размерных связей автоматических производственных
процессов (h Р Ковальчук) 17
1 Требования к качеству изделий,
обеспечиваемому сборкой 17
2 2 Особенности выбора и реализации методов достижения точности при автоматической
сборке 23
2 3 Авючашческая сборка X 29
2 4 Способы и средства транспортирования, автоматической подачи и ориентирования
заготовок и деталей 32
2 5 Требования к конструкции изделий,
предназначенных для автоматической сборки 46
2 6 Последовательность размерного анализа сборки 51
2 7 Размерные связи процесса изготовления
деталей 57
2 8 Анализ установочных размерных связей
при изготовлении деталей 59
2 9 Операционные размерные связи в
автоматизированном производстве 70
2 10 Межоперационные размерные связи 88
11 Размерные связи при изготовлении
дегатей на спутниках в ГГ1С 95
Глава 3 Основы проектирования временных связей автоматизированных производственных
процессов (ИМ Султан-заде) 112
1 Цель и задачи построения временных
связей процесса 112
3 2 Виды взаимодействии процессов во времени 118
3 3 Нестабильность затрат времени на
выполнение процессов 124
3 4 Надежность процессов и оборудования 127
3 5 Организация производственных процессов во времени 147
Глава 4. Основы проектирования и обеспечения информационных связей автоматических производственных процессов (В Г Митрофанов,
ЮМ Союменцев) 159
4 1 Потоки информации в автоматическом производственном процессе Основные
требования к информации 159
4 2 Возможности использования ЭВМ для информационного обеспечения
автоматизированного производственного процесса 172
4 3 Информационное обеспечение сборочного производства
Уровни \ правления 183
4 4 Автоматический контроль размеров деталей 191
4 5 Автоматическое диагностирование режущего
инстр% мента 197
4 6 Автоматическое диагностирование оборудования 199
4 7 Идентификация объектов в ГПС 200
8 Методы подготовки, доставки к оборудованию
и отладки управляющих программ 201
Глава 5 Проектирование автоматизированных и
автоматических производственных процессов
(AI Схирпиадзе, М Г Косов) 212
1 Определение стр\ кгл'ры и основных характеристик
производственного процесса 212
5 2 Усювия применения автоматической сборки 215
5 3 Последовательность проектирования технологического
процесса автоматической сборки 221
5 4 Технико-экономическая оценка вариантов
техно мгического процесса автоматической сборки 230
5 5 Типовые и гр\пповые технологические
процессы сборки 232
5 6 Испочьзование ЭВМ при проектировании
технологического процесса автоматической сборки 234
5 7 Поспедоватепьность проектирования автоматического
сборочного оборудования 235
5 8 Определение надежности работы автоматического
сборочного оборудования 236
5 9 Выбор типа и компоновки автоматического
сборочного оборудования 237
5 10 Гибкие производственные системы сборки 251
5 11 Экономическая оффективность автоматической сборки 261
5 12 Проектирование автоматизированных процессов
изготовления деталей 262
5 13 Последовательность проектирования ГПС
механической обработки 278
5 14 Выбор вида, компоновки и числа
автоматизированных станочных систем 295
Список литературы 309